TICKLED
Cyber-Physical Systems Project
Group project;
Ava Sarabi | Billy Plummer | Prisca Vilsbol
Royal collage of art Imperial collage London and Pratt Institute
OCT 2023

Project Overview
This project explores emotional interaction between humans and machines through a multi-touch sensor and expressive robotic figure. The sensor, designed with skin-like sensitivity, detects pressure and touch patterns, while machine learning interprets the emotional quality of each gesture. The robot responds with movements that mirror these emotions, creating an experience where users are encouraged to treat the sensor gently and engage in a more empathetic exchange with technology.


Inspiration & Intentions
We were compelled by the idea of changing the physical texture and experience of touch, moving away from what it almost always is: hard, smooth, and flat. We also wanted to work with new materials to build a sensor from scratch. Additionally, we considered how the impressive new “intelligence” of generative AIs like ChatGPT is still missing access to sensing in the real world, which is essential for true intelligence. We wanted to explore how we could create a physical interface for something theoretically very intelligent.
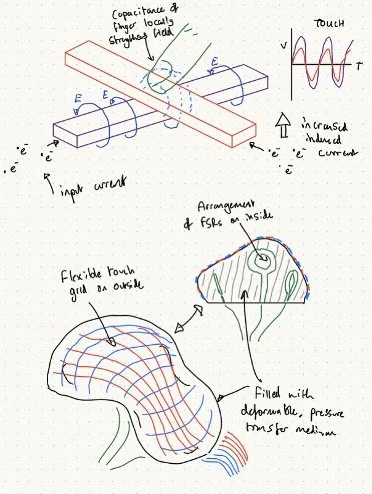
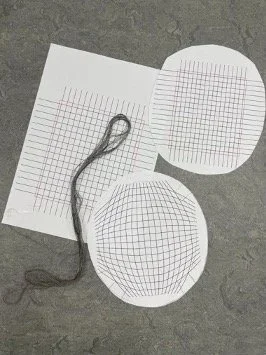
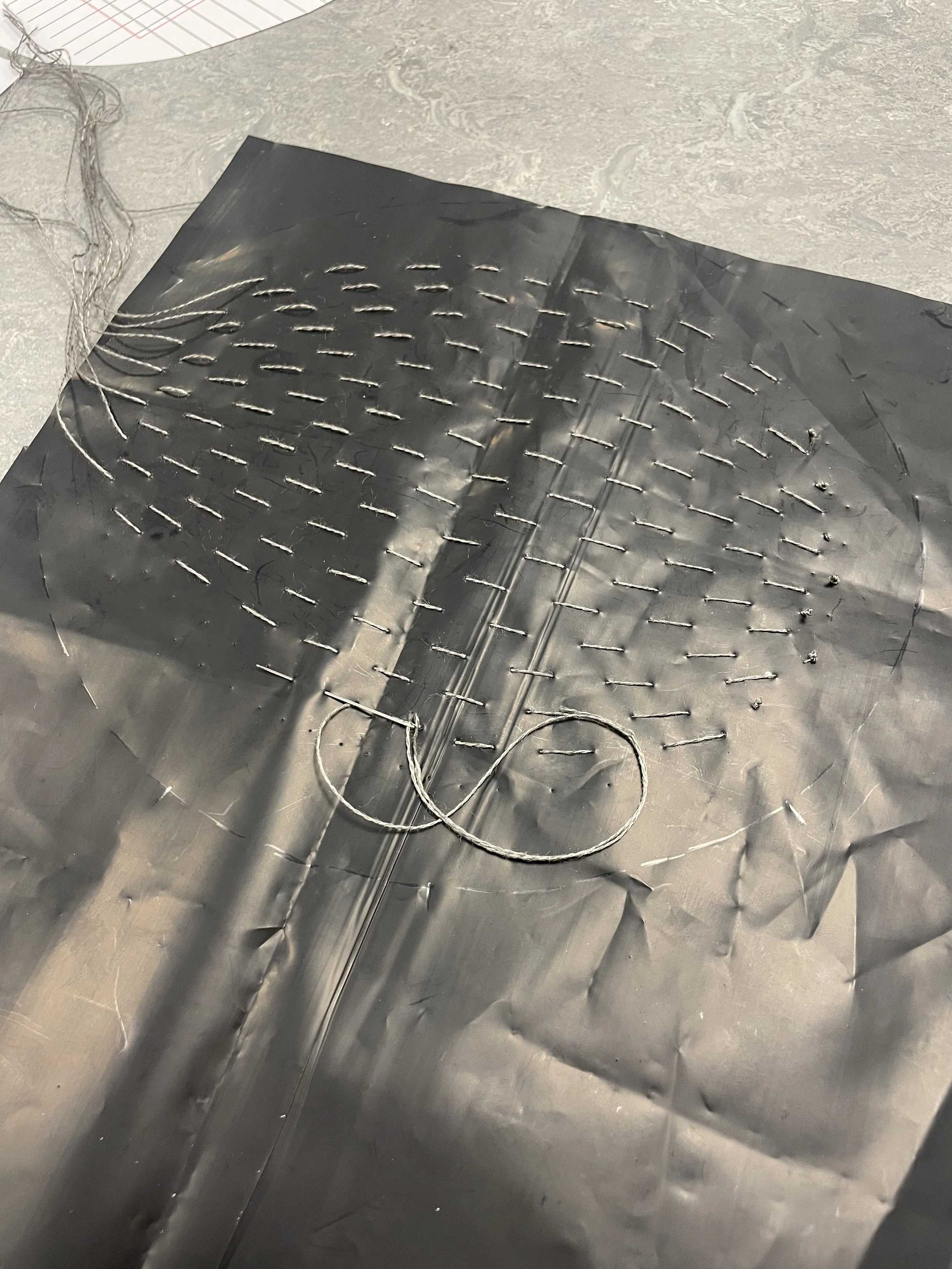
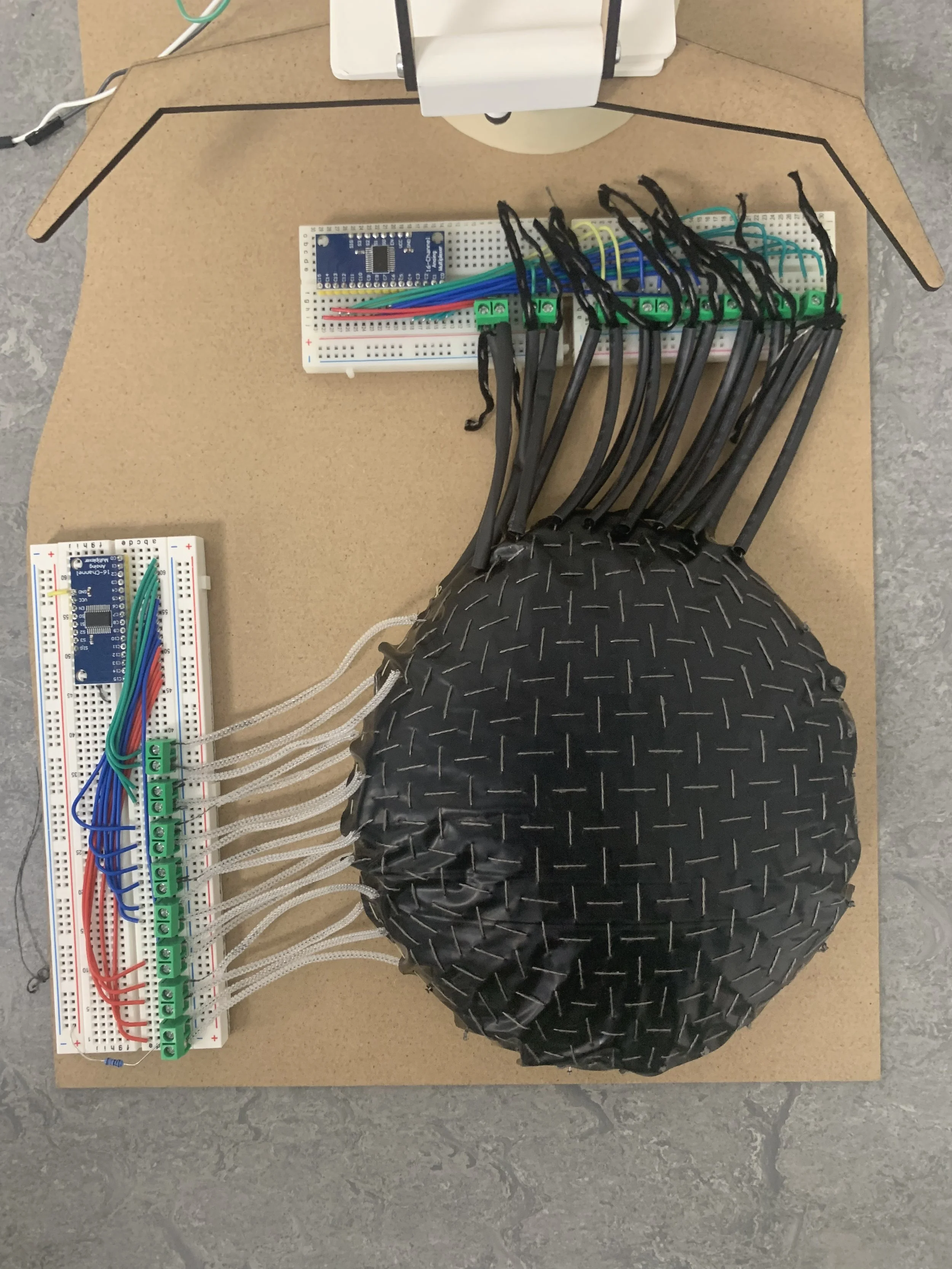
How the Sensors Was Made
The touch sensor was built from scratch using Velostat, a thin piezoresistive film that changes resistance when pressure is applied. Onto this film, we wove conductive yarn to form a grid of rows and columns. Each crossing point in the grid acts as a sensing node. To give the sensor a tactile, skin-like quality, the grid was placed on top of a squishy foam pad wrapped in soft fabric, creating a responsive and resilient surface.